



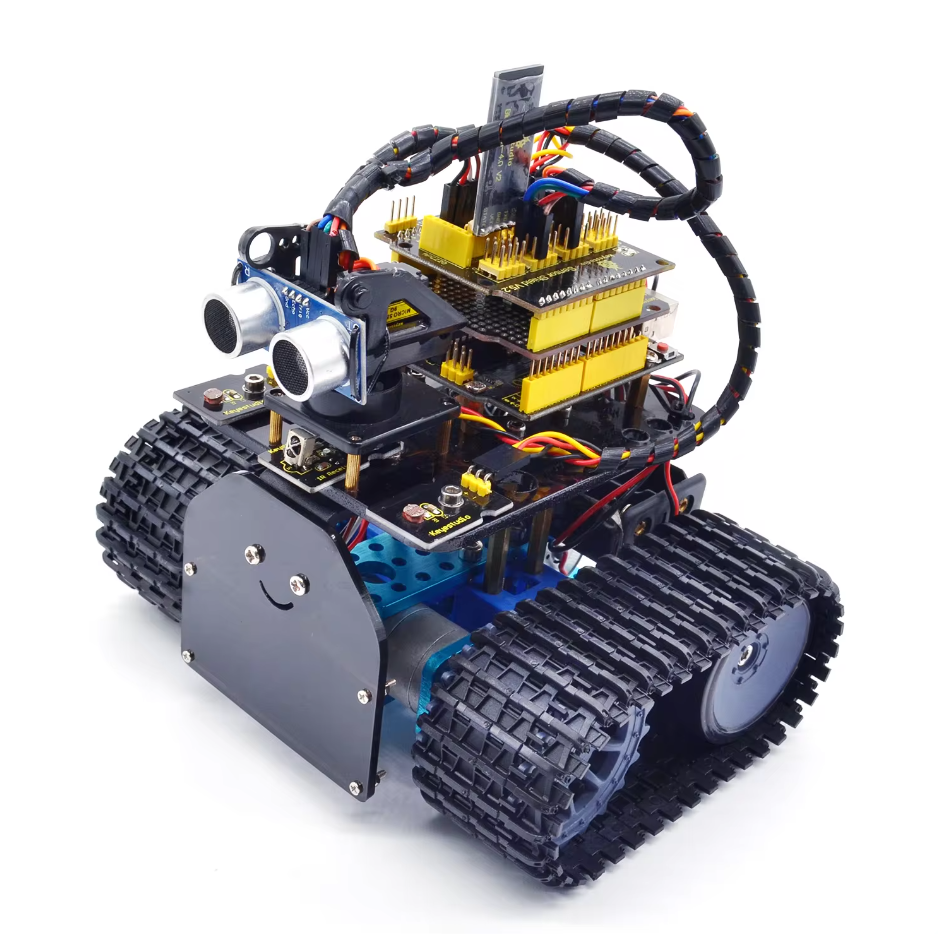
Команда Keyestudio разработала мини-танк-робота. Он оснащен процессором, который можно программировать с помощью Arduino IDE. Через специальный шилд, подключаемый к процессору, можно сопоставлять его пины с датчиками и исполнительными устройствами, считывать показания датчиков и управлять устройствами, принимая решения о том, как действовать.
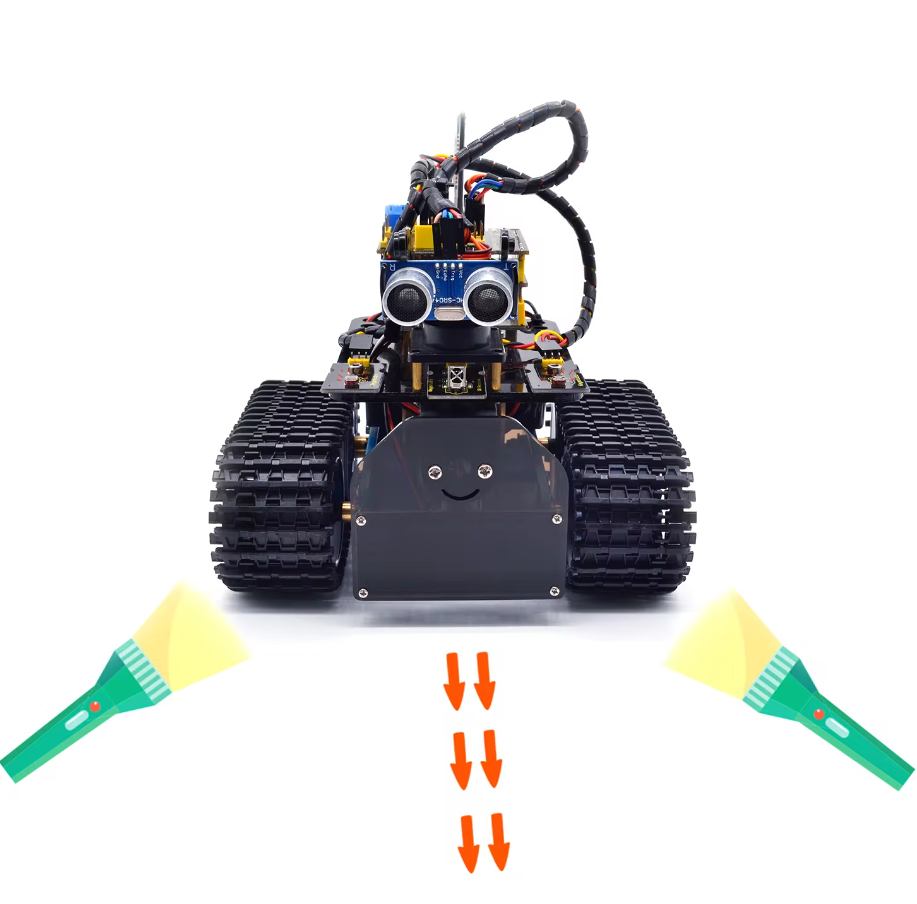
Робот может выполнять множество функций, таких как обход препятствий, управление с ИК пульта, управление через Bluetooth, следование за светом и многое другое.
Предусмотрено 15 учебных проектов, от простых до сложных, которые помогут вам собрать свой собственный умный мини-танк и предоставят базовые знания о датчиках и модулях. Кроме того, это лучший выбор для обучения графическому программированию.
Онлайн инструкция по сборке ENG: инструкция KS0428
Cкачать код и необходимые библиотеки: код KS0428
Особенности:
- Множество функций: обход препятствий, следование, ИК-пульт дистанционного управления, управление по Bluetooth, ультразвуковое следование и отображение эмоджи лиц.
- Простая сборка: не требуется пайка, легкая полная сборка.
- Высокая прочность: кронштейн из алюминиевого сплава, металлические двигатели, высококачественные колеса и гусеницы.
- Высокая расширяемость: подключение многочисленных датчиков и модулей через шилд драйвера двигателя и шилд датчиков.
- Несколько вариантов управления роботом: ИК-пульт дистанционного управления, управление приложением (системы iOS и Android).
- Базовое программирование: код языка C Arduino IDE.
Технические характеристики:
- Рабочее напряжение: 5В
- Входное напряжение: 7-12В
- Максимальный выходной ток: 2A
- Максимальная рассеиваемая мощность: 25 Вт (T=75℃)
- Скорость мотора: 200 об/мин при 5В
- Режим управления мотором: драйвер шагового двигателя L298P двух мостовый
- Угол ультразвукового восприятия: менее 15 градусов
- Дальность ультразвукового обнаружения: 2 см – 400 см
- Дистанция управления с ИК пульта: 10 м (по замерам)
- Дистанция управления через Bluetooth: 50 м (по замерам)
Видео с демонстрацией работы робота:
Видео сборки робота:




 с коробкой")
 без кабеля")


 MOSFET IRF540 V4.0 - 4 канала")
